Principio di misura
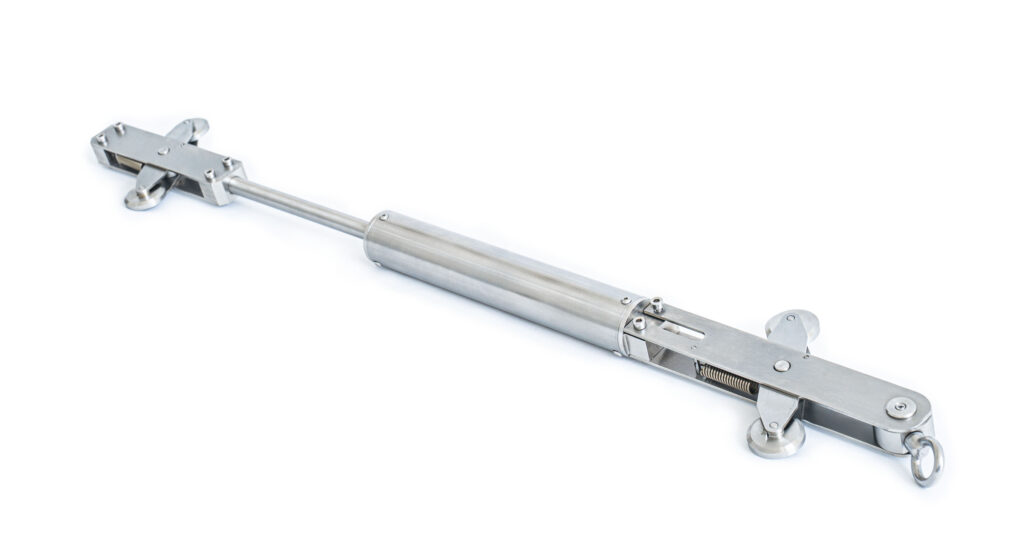
Gli IPI da noi proposti sono realizzati da un corpo cilindrico in acciaio inossidabile completo di rotelle basculanti per il mantenimento dell’orientamento nei tubi guida dove questo viene generalmente installato.
La accuratezza delle calibrazione comporta una bassa dipendenza dalla temperatura , una alta risoluzione e bassa influenza di eventuali disturbi. Il sistema di controllo viene generalmente realizzato da più sensori IPI, interconnessi fra loro a mezzo di un singolo cavo, inseriti in una colonna inclinometrica che realizza l’elemento di riferimento e guida per l’intero sistema.
Grazie alle coppie di rotelle basculanti applicate sul corpo di ciascuno strumento, la catena viene calata nella colonna, portando i vari sensori della catena, alle quote prestabilite. La colonna inclinometrica segue il terreno nei suoi movimenti, provocando una conseguente variazione di inclinazione nei singoli sensori IPI che forniranno, in automatico, i dati che consentono di rilevare la deformazione della colonna stessa.
Il primo strumento della catena sarà collegato ad una unità di acquisizione (nostra CUM300) dove tutti i dati, acquisiti in automatico, saranno inviati ad un software di elaborazione e di analisi che consentirà, fra l’altro, l’invio di segnalazioni di allarme per superato valore dei parametri controllati.
Specifiche tecniche:
| Dimensioni della Sonda |
Diametro 30 mm, lunghezza 1400 mm |
| Rullo |
1000 mm |
| Materiale della Sonda |
AISI 316 |
| Materiale del Rullo |
AISI 316 |
| Tipo di sensore |
biassiale – MEMS |
| Campo di misura |
da +/- 5° a +/- 20° |
| Risoluzione |
0.005° |
| Precisione |
< +/-0.1% F.S |
| Alimentazione |
12-15 Vdc |
| Versione con uscita analogica |
4-20 mA (3 fili) |
| Versione con uscita digitale |
RS485 MODBUS RTU protocol
2400, 4800, 9600, 19200, 38400, 57600 Boud Rate
(connessione fino a 128 sensori con cavo 2x2x0,5 mm) |
| Temperatura di funzionamento |
-10…+40 °C |
| Stavilità a lungo termine |
< 0.05° |